Wireless Indoor Navigation & SLAM
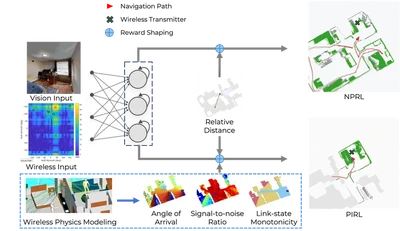
Physics-informed RL and digital-twin methods for zero-shot wireless navigation and efficient environment sensing.
A growing portfolio of wireless sensing, robotics, and ISAC systems. New projects will be added as they mature.
Physics-informed RL and digital-twin methods for zero-shot wireless navigation and efficient environment sensing.

Mobile-robot-based platform for closed-loop wireless localization and navigation experiments.
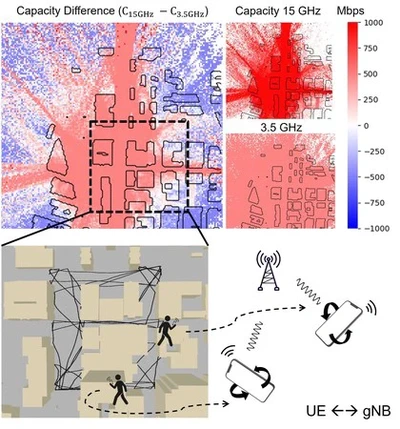
Transformer-based inference for antenna and band coordination in high-mobility, multi-band UEs.