
Wireless Indoor Navigation & SLAM
Physics-informed RL and digital-twin methods for zero-shot wireless navigation and efficient environment sensing.
Ph.D. candidate at NYU Wireless working on RF sensing, wireless robotics, multimodal spatial reasoning, and reinforcement learning.
Ph.D. in Electrical and Computer Engineering
2022-09-01
New York University
M.S. in Computer Engineering
2020-09-01
2022-05-31
New York University
B.E. in Electrical Engineering and Automation
2015-09-01
2019-06-30
China Agricultural University
I am a Ph.D. candidate in Electrical and Computer Engineering at New York University, supervised by Prof. Sundeep Rangan in NYU Wireless. My research spans RF sensing, wireless robotics, multimodal spatial reasoning, and reinforcement learning, with recent focus on likelihood-based RF localization and full-posterior inference for 6G decision making, as well as multi-band antenna/receiver coordination under mobility. I build end-to-end systems that connect theory, simulation, and robotics experiments.
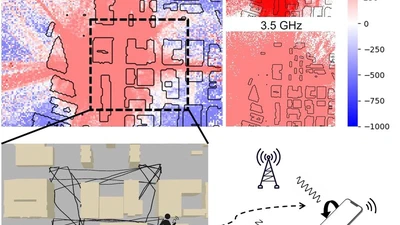
Full-posterior inference pipelines for 6G decision making and risk-aware control.
Scene-graph representations and agentic inference for spatial grounding and object search.
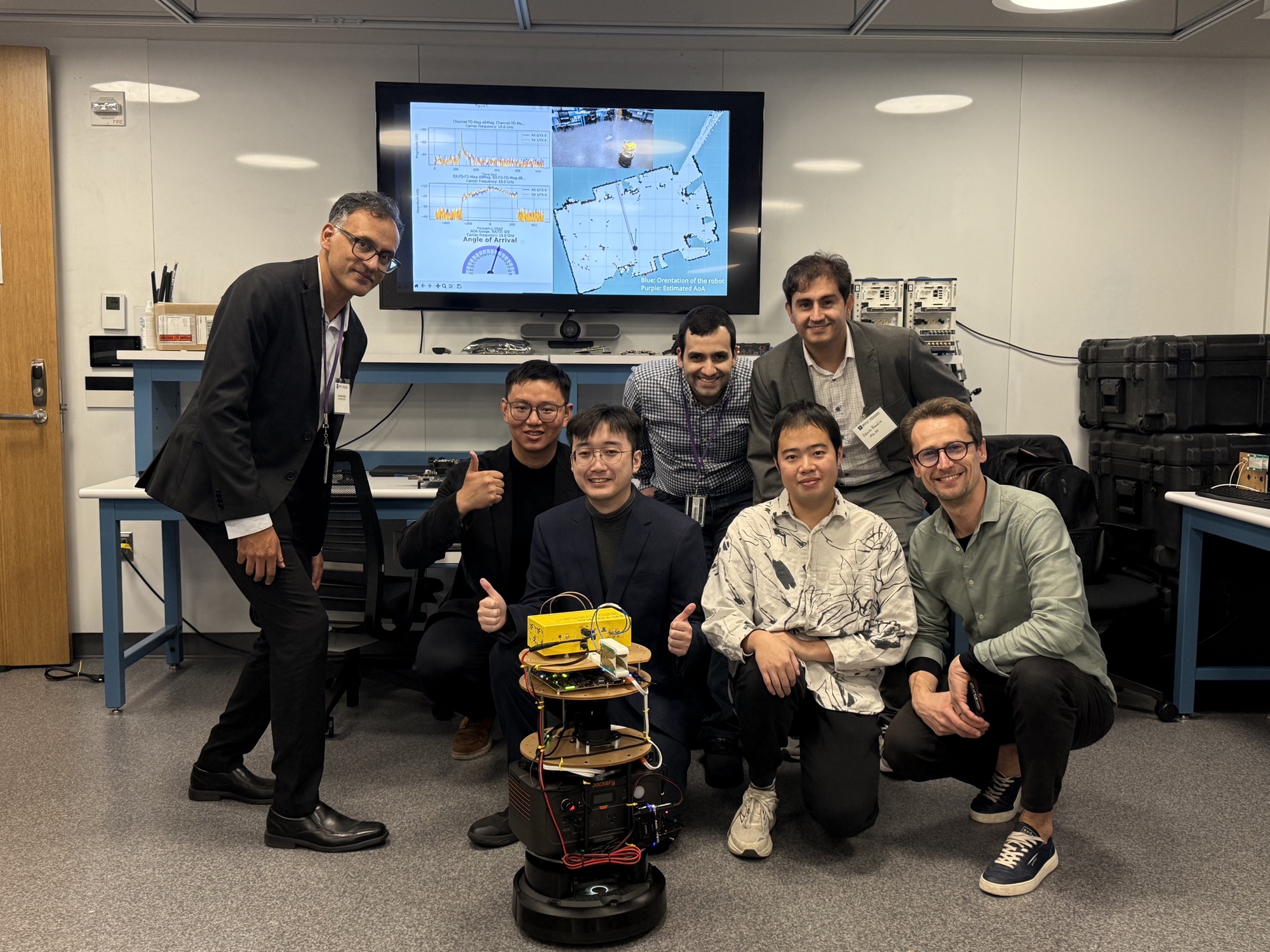
FR3/TurtleBot4 platform for closed-loop localization and indoor navigation experiments.
Transformer-based antenna and band coordination under mobility.
Wireless systems that move from theory to real-world experiments.
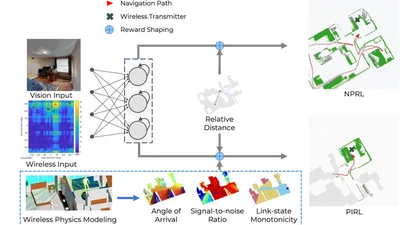
Physics-informed RL and digital-twin methods for zero-shot wireless navigation and efficient environment sensing.

Mobile-robot-based platform for closed-loop wireless localization and navigation experiments.
Transformer-based inference for antenna and band coordination in high-mobility, multi-band UEs.
I am part of NYU Wireless, a leading 6G research center at NYU Tandon. For an overview of the center’s scope, facilities, and research programs, see the NYU Wireless overview deck.